
Texture as Interaction
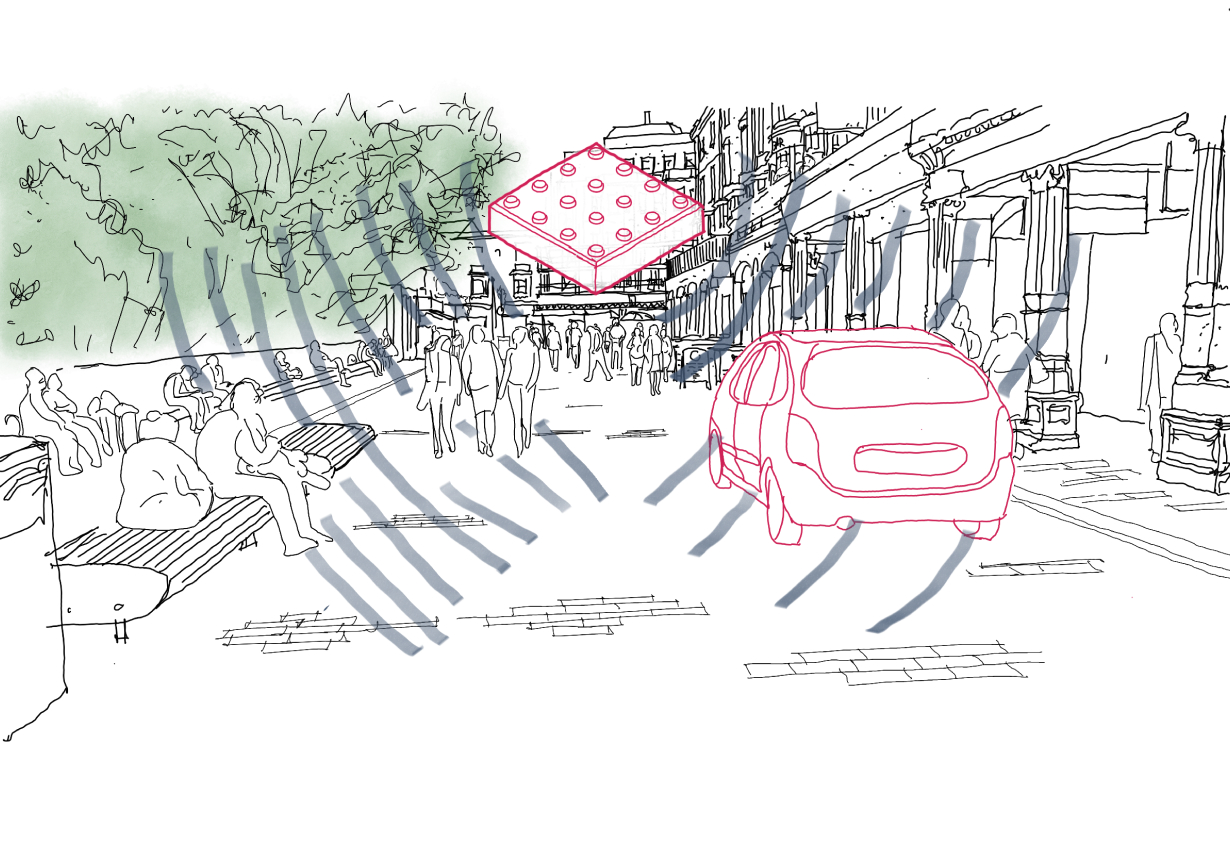
Current trends in urban design aim to reduce the number of vehicles in city centers. This trend is part of a growing focus on pedestrian and human-centered cities. At the same time, there is a growing use of autonomous vehicles and agents in our urban space.
Following these trends, we can assume that in the near future, most vehicles in our urban space will be autonomous. This raises questions about the interaction and agency of pedestrians and robots.
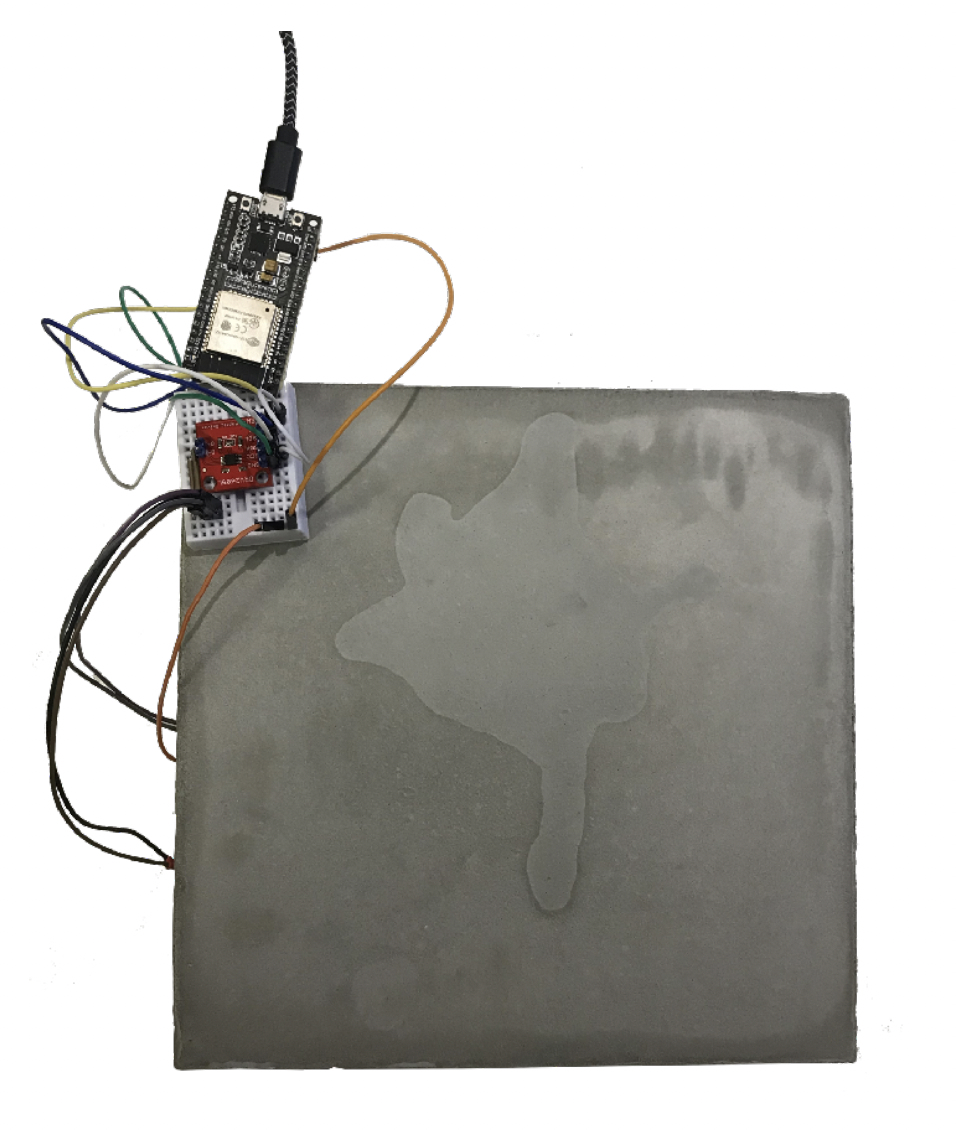
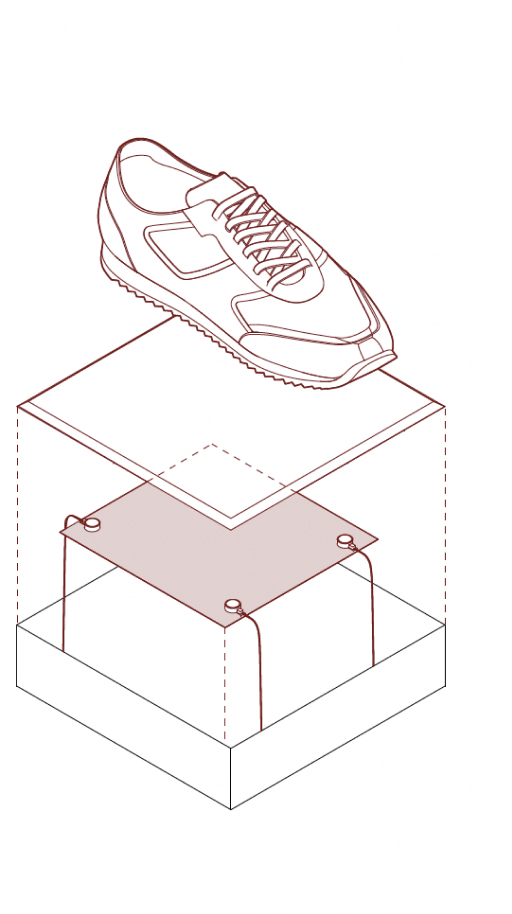
This project studies the use of public space as a mediator for a trifold interaction between autonomous agents and pedestrians. This project suggests that tactile and capacitive paving in public spaces can be used to communicate autonomous vehicles' intentions to pedestrians. It can also be used to communicate to the autonomous vehicle pedestrian location and intentions.
This use of public space as a communicator and mediator will allow for a more trusting interaction between a person and autonomous agents. It will also afford public space with performative communicative abilities.